2016〜17年度 国土交通省建設技術研究開発助成
2018~21年度 文部科学省科学研究費助成事業基盤研究B
光量の影響を受けにくく、短時間で点群データを計測可能なLiDAR(Light Detection And Ranging)を搭載したUAV搭載型レーザスキャナを開発しました。
3次元モデル生成システム

ルートプロファイリングで計測距離が近く、入射角度の高い高精度点群データが抽出可能に。
本製品の特長
①飛行状態判定機能
GNSS受信機からFix解のみの移動軌跡を取得します。移動軌跡から飛行速度を算出し、等速直線運動で飛行中の各機器の計測データのみを抽出し、以降での処理対象とします。
②時刻同期機能
各機器のGNSS時刻を基準に、LiDARの計測点単位で最も近い時間に計測されたIMUの計測データを同時刻に計測されたデータとして同期します。GNSS受信機で測位した位置情報は、現時刻に対して最も近い時刻に計測された前後のデータから線形補間で算出します。
③点群データ生成機能
IMUによるRoll角、Pitch角、GNSS受信機による緯度、経度、標高、Yaw角を用いて、LiDARによる3次元の計測点ごとに緯度、経度、標高を軸とした座標系へ剛体変換を行います。そして、剛体変換後の全点を重畳することで点群データを生成します。
④キャリブレーション機能
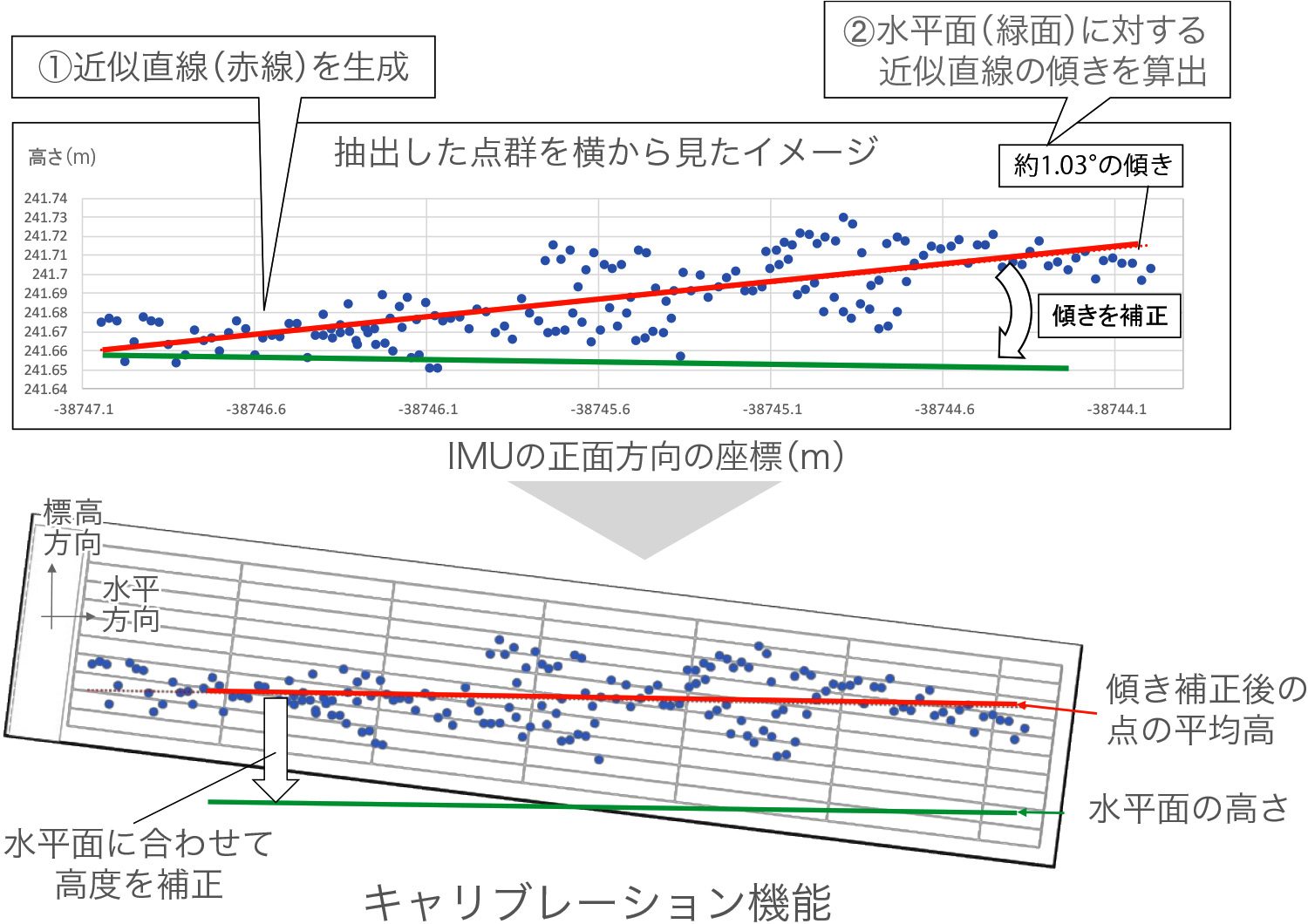 IMUとGNSS受信機による計測誤差を補正します。まず、剛体変換後の点群データをLiDARの計測フレーム単位で分割します。次に、調整面を計測したフレームの点群データを取得します。そして、点群データに近似平面を生成し、調整面の角度に合わせて補正します。このとき、他のフレームも同じ角度で補正します。最後に、調整面の構成点の標高値に合わせて、点群データの高さを補正します。他のフレームの点群データは、補正後の点群データと重なり合う範囲の標高値が合致するように補正を繰り返します。
IMUとGNSS受信機による計測誤差を補正します。まず、剛体変換後の点群データをLiDARの計測フレーム単位で分割します。次に、調整面を計測したフレームの点群データを取得します。そして、点群データに近似平面を生成し、調整面の角度に合わせて補正します。このとき、他のフレームも同じ角度で補正します。最後に、調整面の構成点の標高値に合わせて、点群データの高さを補正します。他のフレームの点群データは、補正後の点群データと重なり合う範囲の標高値が合致するように補正を繰り返します。
⑤ルートプロファイリング機能
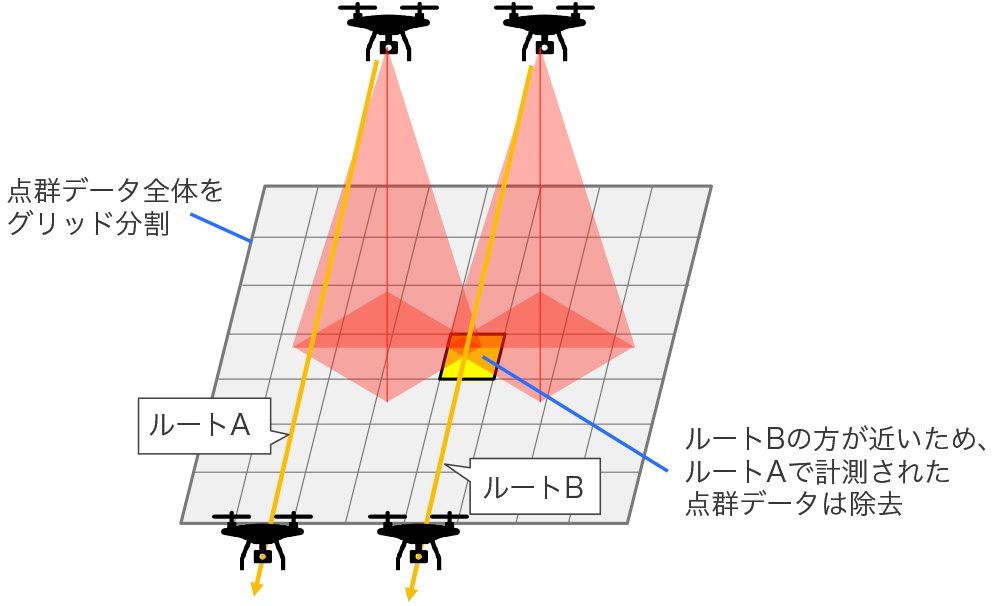 計測地点から見て近い飛行ルートから計測された点群データ以外を除去することでフィルタリングします。本処理のイメージを右図に示します。まず、点群データ全体を一定の大きさのグリッドで分割します。次に、グリッドごとに最も近い等速直線運動で飛行したルートを探索します。そして、探索したルート以外から計測した点群データは除去することで、計測距離が近く、入射角度の高い点群データのみを抽出することができます。
計測地点から見て近い飛行ルートから計測された点群データ以外を除去することでフィルタリングします。本処理のイメージを右図に示します。まず、点群データ全体を一定の大きさのグリッドで分割します。次に、グリッドごとに最も近い等速直線運動で飛行したルートを探索します。そして、探索したルート以外から計測した点群データは除去することで、計測距離が近く、入射角度の高い点群データのみを抽出することができます。
● 計測結果
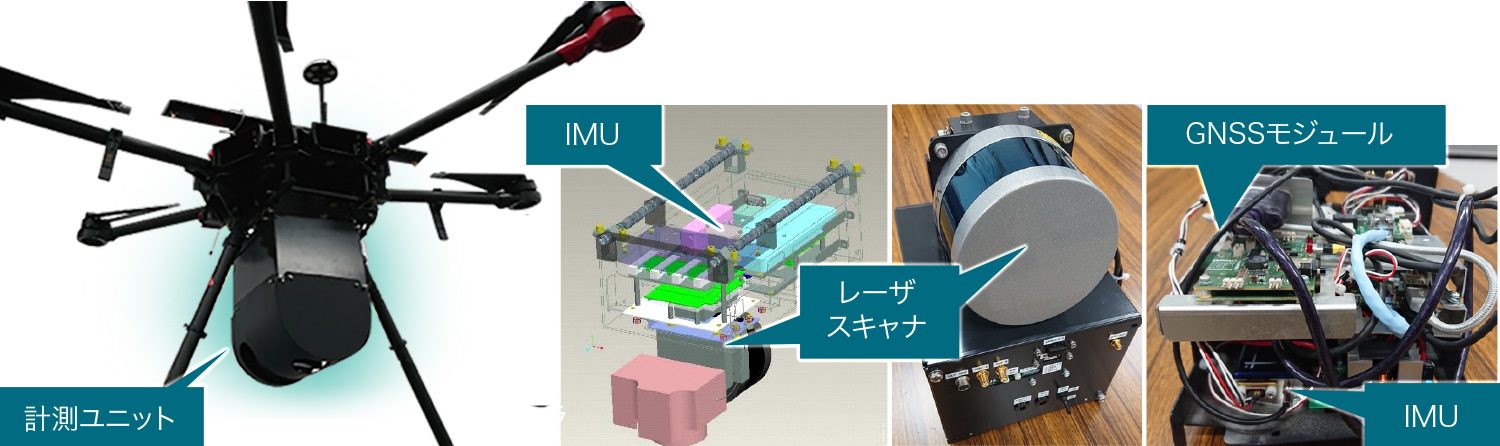
本製品をUAVに搭載することで、標準偏差3cmの精度で点群データを計測可能であることを確認しました。写真はDJI Matrice 600に搭載した場合の例です。本製品が搭載するレーザスキャナ(Velodyne社 VLP-16)の計測精度が標準偏差3cm、GNSS受信機(iシステムリサーチ社 Septentrio AsteRx-m2a with SOI)の計測精度が水平方向に0.6cm、IMU(東京航空計器社)の計測精度がRoll角、Pitch角共に±0.5°であることから、本製品の搭載技術により、これらの機器がもつ計測誤差や飛行挙動・計測距離によるズレを軽減できていることを確認できました。

UAV搭載型レーザスキャナ
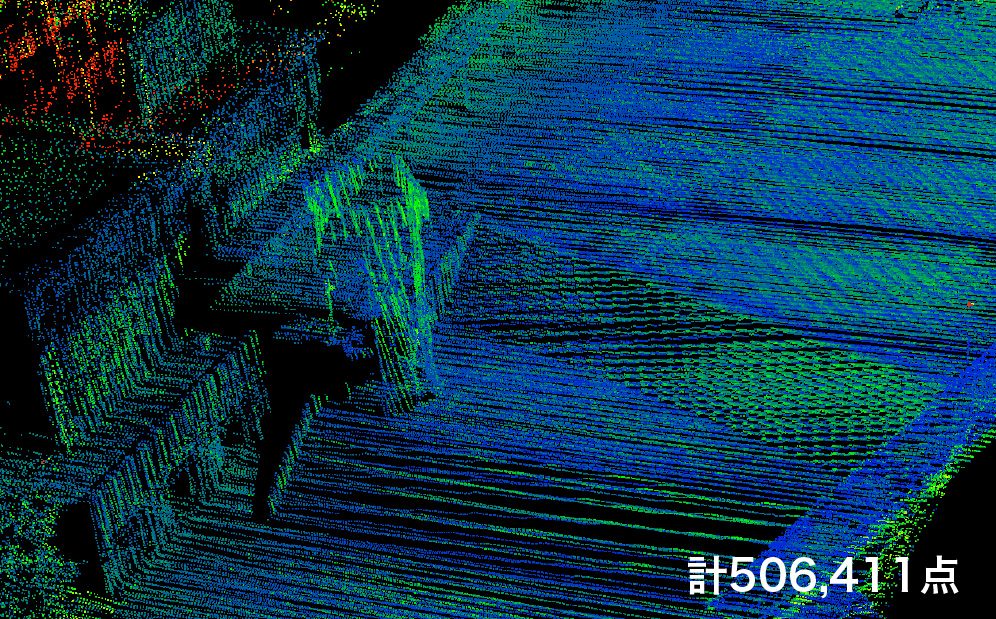

UAV搭載型レーザスキャナの点群データ

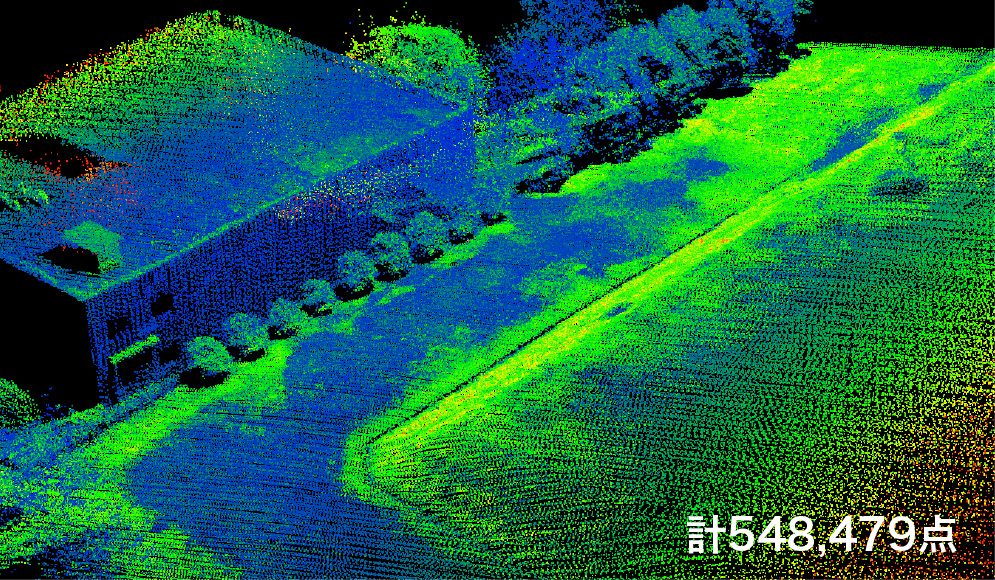
地上設置型レーザスキャナの点群データ